רכבים אזרחים אוטונומיים לשימוש הקהל עדיין לא קרובים למבצעיות * גם מטוסים אוטונומיים לא נראה לפני אמצע שנות השלושים של המאה * למה זה? מה מונע מהכלים האוטונומיים לפרוץ לחיינו? ומי צפוי להיכנס ראשון – מטוס או מכונית? * על כל אלה כאן במאמר, המנתח את הגורמים המרכזיים הקשורים בהבשלת היכולות האוטונומיות
נפתח בניווט הכלי. יכולת הניווט של הכלי נמדדת בעמידה בדיוק הניווט הנדרש לטובת שמירת הנתיב וביכולת הסנסורים ומערכות הניווט לשמור את הכלי ברמת הדיוק הנדרשת בכל שלבי התנועה.
מכונית אוטונומית
רכב אוטונומי נדרש לשמור רמת דיוק ניווט גבוהה ביותר מהרגע שזז ועד שנעצר. עליו לנוע בתוך נתיב – מסדרון צר של מטרים ספורים ללא חריגה ולבצע זאת גם כאשר הרכב במרתף חניה, ללא סימוני נתיב, בערים גדולות עם גורדי שחקים, במנהרות באורך של עשרות קילומטרים, בתנאי ראיה משתנים של יום, לילה, ערפל, סנוור שמש וכו'.
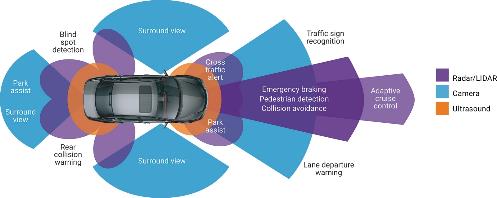
הדרישות הנ"ל מכתיבות כי דרישה לריבוי סנסורים (GPS, סנסורי תמונה, מכ"מ, לייזר ו-IR) ברכב, כדי להצליח ולשמור את הנתיב הנדרש בכל עת. הנושא הזה לחלוטין לא פתור עדיין באופן מלא ונדרש בו עוד מאמץ פיתוח רב.
מטוס אוטונומי
מטוס אוטונומי נדרש לדיוק ניווט גבוה בהסעה, בהמראה ובנחיתה. כאשר המטוס באוויר דיוק הניווט הנדרש יורד לפי שלבי הטיסה.
כיום מערכות ה-GPS עם סיוע של מערכות דיפרנציאליות באזורי שדות התעופה, מספקות בלי שום בעיה את הדיוקים הנדרשים לטיסה אוטונומית. כבר כיום נחיתה אוטומטית מדויקת נעשית באמצעות מערכת ILS הנמצאת בשימוש נרחב. עיקר הפער במטוסים הוא במערכות גיבוי למקרה שה GPS נחסם או משובש. לנושאים האלה יש פתרונות מסוגים שונים שכולם זמינים ואפשריים.
****
See (Sense) & Avoid. יכולת See (Sense) & Avoid הכרחית בכל כלי תחבורה אוטונומי למקרה שמכשול שכמובן אינו אמור להיות בדרך מופיע על / טס דרך נתיב התנועה של הכלי האוטונומי והכלי האוטונומי נדרש לזהות את העצם, להחליט שהוא מכשול ואז לבצע תמרון שימנע ממנו להתנגש בו (ברכב לעקוף או לעצור ובמטוס לבצע תמרון הפרדה מהמכשול).
מכונית אוטונומית
בכביש יש אין סוף מכשולים שבצורה אקראית יכולים להתייצב על נתיב הנסיעה של הכלי ולחייבו לתמרן יחסית למכשול כדי לא להתנגש בו (לעצור או לעקוף). המכשולים האלה כוללים אנשים, חיות, רכבים אחרים, עצמים שונים שהונחו/נזרקו על הכביש, גשרים, כבלים ומה לא.
כדי לזהות מכשולים אלה נדרשות מערכות סנסורים מסוגים שונים (אופטי בתחום הנראה ובתחום ה IR, מכ"מ, לייזר וכו') ויכולת עיבוד אינפורמציה מתקדמת, שיאפשרו זיהוי העצם וסיווגו כמכשול בטווח המאפשר לרכב להגיב ולהימנע מפגיעה בו בכל תנאי תאורה ומזג אוויר.
הנושא הזה מורכב ביותר ויש בו עדיין פערים גדולים המחייבים פיתוח ומחקר בתחום הסנסורים, בעיבוד תמונה, בסינון ועיבוד אינפורמציה רלוונטית ובהקטנת התראות שווא (Nuisance Indications).
מטוס אוטונומי
במטוס יש לחלק את התווך לצד הקרקעי (הסעה, המראה ונחיתה) והצד האווירי.
באוויר, מעצם היותם של נתיבי הטיסה מבוקרים ונשלטים על ידי בקרה – אין כמעט אף פעם מצב שמכשול "מתייצב" על נתיב הטיסה של מטוס. עיקר הבעיות נובעות מכך שמטוסים אחרים חודרים לנתיב הטיסה בגלל טעות טייסים או טעות בקרה. טעויות מסוג זה פתורות כבר היום ע"י מערכת TCAS כך שחיבורה לטייס האוטומטי וביצוע אוטומטי של תמרון הימנעות, ייתן פתרון מידי לסוגיה זו. עדיין יכול להיות מצב בו התנועה המפריעה אינה מצוידת בטרנספונדר ואז מערכת ה-TCAS לא תתריע ולכן יידרש פתרון של סנסור נוסף (למשל מכ"מ א"א שיאפשר את זיהוי האיום והנחיית תמרון ההפרדה).
בתחום השדה הקרקעי הפתרון יהיה כנראה הידוק מערכת הבקרה על כל התנועות ומניעת האפשרות שמכשול (למשל רכב תחזוקה) יתייצב על מסלול הנסיעה של המטוס. כללית, הפערים לפתרון המצב באוויר ועל הקרקע קטנים והפתרונות הטכנולוגים קיימים.
******
תאום במרחב. תאום במרחב משמעותו היות כל הכלים הנעים במרחב ומשתלבים בו בצורה מתואמת מתמשכת המאפשרת רמות בטיחות ויעילות גבוהות.
מכונית אוטונומית
כיום רכבים לא מבוקרים לחלוטין במרחב על ידי אף גורם. תנועת כל כלי יחסית לרכבים האחרים היא בעצם אקראית פחות או יותר לפי חוקי התנועה. הרכבים מתחילים את נסיעתם בצורה אקראית וגם מסיימים אותה כך. אין גורם היודע מתי רכב מסוים יעלה או ירד מהכביש ולאן הוא נוסע.
ברמה המקומית רכבים משתלבים בתנועה כיום בצורה עצמאית וברוב הפעמים באופן לא מבוקר (למשל ללא רמזור), לפעמים גם לא לפי חוקי התנועה. כאשר רכבים נוסעים על הכביש ניתן אמנם להניח כי ישמרו על נתיב נסיעתם, אך גם זה לא תמיד נכון (ודאי בסביבה בה נוסעים רכבים מאוישים). לעיתים יש פקקי תנועה וצפיפות גדולה הגורמת לבעיה קשה בהשתלבות בתנועה.
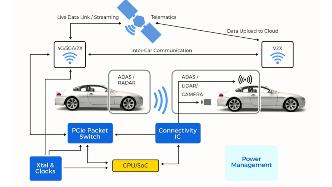
פתרון סוגיות אלה דרך גורם שליטה מרכזי לו כולם מצייתים (בדומה למצב בתעופה) אינו מעשי כלל לרכבים והכיוון הוא פתרון מקומי מבוזר; כלומר, כל רכב (מאויש או אוטונומי) ישדר ויקבל נתונים מרכבים אחרים בסביבתו הקרובה וכך יתאפשר ל AI בנהג האוטומטי של הרכבים האוטונומיים לשלב ולהשתלב בתנועה בצורה בטוחה ויעילה, שתקטין היווצרות פקקים. ככל שיהיו יותר רכבים אוטונומיים ופחות רכבים מאוישים התנועה תזרום יותר חלק. הנושא הזה עדיין רחוק מפתרון ודורש פיתוח רב והסכמה על פרוטוקולים ואלגוריתמיקה מסובכת בין יצרנים רבים וברגולציה של מדינות.
מטוס אוטונומי
כיום – ולמעשה כבר שנים רבות, מטוסי נוסעים/מטען תמיד נשלטים על ידי גורם מבקר/מתאם אחד במרחב בו הם נמצאים. למעשה אין מצב שבו הם מבצעים נתיב טיסה אקראי (גם אם הם נדרשים לפתע לתפעול אקראי הם מעדכנים את הבקר שמרחיק מהם מטוסים אחרים).
היות המרחב האווירי והקרקעי של מטוסים מבוקר תמיד על ידי גורם שולט אחד מונע כמעט לגמרי בעיות של השתלבות בתנועה והיווצרות הפרעות לתנועה כמו ברכבים.
שיטת פעולה זו צפויה להישאר גם עם כניסת מטוסים אוטונומיים ולכן בשלב ראשון לא צפויה כל בעיה בנושא זה למטוסים אוטונומיים.
*****
החיים בצוותא: כלים מאוישים ואוטונומיים. שילוב של כלים אוטונומיים עם כלים מאוישים כולל אלמנט משמעותי של אקראיות בנתיב הכלי המאויש עקב המגבלות האנושיות של הנהג/טייס (טעויות מקריות בקליטת המצב המרחבי או הנחיות פעולה במערכות מבוקרות) וההתנהגות האנושית, שלפעמים אינה צפויה ובניגוד לחוקים, נהלים והנחיות (נכון בעיקר לעולם הרכב המאויש).
גורמים אנושיים אלה מסבכים את המצב במיוחד ובעיקר במערכת בה מראש כל התנועה אינה נשלטת ומנוהלת על ידי גורם שליטה מרכזי – עולם כלי הרכב.
מכונית אוטונומית
כל עולם הרכבים האוטונומיים יצטרך להשתלב יחד עם נוכחות רכבים מאוישים על אותם משאבי דרך (כביש) וללא גורם שליטה מרכזי במרחב. לא ניתן לבנות מערכת כבישים נפרדת לרכבים אוטונומיים.
שילוב זה של נהגים עם מכוניות רובוטיות מכניס המון גורמי אי-וודאות למערכת, שמקורם באנשים הנוהגים. המון פעולות של נהגים אנושיים הן בלתי צפויות במושגים של מערכות אוטונומיות ולכן מחייבות ברכבים האוטונומיים מערכות משוכללות מאד, שידעו להתגבר על אי הוודאות והאקראיות שמכניסים הנהגים.
סקרתי קודם במספר נושאים של השפעות כאלה (See & Avoid וחיים במרחב מתואם). הנושא הזה עדיין רחוק מפתרון.
מטוס אוטונומי
במטוסים לא תהיה שום בעיה לשלב במרחב מטוסים מאוישים עם מטוסים אוטונומיים.
עצם היות המרחב מבוקר והיות שכולם נשמעים להנחיות גוף השליטה מרכזי, בעצם הופכות את נושא המטוסים המאוישים הטסים בצד מטוסים רובוטיים לנושא כמעט פתור לחלוטין.
אין זה משנה אם רובוט יוציא לפועל את הנחיות הבקרה או טייס יעשה זאת. שניהם למעשה יעשו בהקשר זה את אותו הדבר. לכן בכל מקרה תשמר הבטיחות וההפרדה בין המטוסים בין אם מאוישים או אוטונומיים.
****
רגולציה. הסדרת נסיעת מכוניות על כבישים ומטוסים בשמיים נעשית בין היתר בעזרת מערכת של חוקים ותקנות המגדירות סעיפים ודרישות רבות של תכנון והפעלת הכלים. כיום החוקים והתקנות מוגדרים לכלים מאוישים (רכבים או מטוסים).
מכונית אוטונומית
מכיוון שהרכב האוטונומי מתוכנן להצטרף לכבישים בהם נוהגים נהגים בשר ודם, הבסיס הרגולטיבי של תנועת רכבים יהיה הרגולציה הקיימת של חוק ותקנות התעבורה.
לאלו תצורף רגולציה ייעודית למכוניות האוטונומיות אשר תגדיר דרישות שונות לתכנון, יצור והשתלבות הרכבים האוטונומיים במרחב. דרישות שיבטיחו את היכולת, האמינות ואת ההשתלבות של רכבים אוטונומיים במרחב של רכבים מאוישים.
בסה"כ כנראה מדובר בשינויים לא גדולים יחסית למצב היום משום שהרבה יותר פשוט יהיה לדרוש מהכלים האוטונומיים לעמוד ברגולציה הקיימת לרכבים מאוישים מאשר לדרוש מנהגים שינוי לטובת התאמה לכלים אוטונומיים. הרבה יותר קל להתאים את הרובוט מלשנות התנהגות אנושית.
מטוס אוטונומי
כניסת מטוסים אוטונומיים תחייב שינויים מפליגים בחוקי ותקנות התכנון, יצור והפעלת הכלים האוטונומיים.
כל הרגולציה היום בנויה על נוכחות אנושית כגורם מרכזי בהפעלה של הכלים והוצאת האדם מהכלי תחייב ניסוח חדש ואחר של סעיפים רבים.
כתיבת רגולציה זו היא תהליך איטי ומתמשך שייקח זמן והוא בפירוש חלק מהגורמים שיעכבו כניסת מטוסים אוטונומיים למרחב.
******
פסיכולוגיה של השימוש בכלי האוטונומי. הפסיכולוגיה האנושית היא נושא מורכב ואינו מדע מדויק. השאלה היא עד כמה נוסעים יפחדו יותר לנסוע ברכב/ מטוס אוטונומי יחסית למצב המוכר של נסיעה עם נהג/ טייס?
מכונית אוטונומית
כבר כיום כאשר כל הכלים (מכוניות ומטוסים) מאוישים, מחקרים רבים מראים, כי אנשים תופסים רכב כיותר בטוח ממטוס למרות שטיסה במטוס בטוחה בסדרי גודל מנסיעה במכונית.
מעבר למכונית אוטונומיית לא צפוי לשנות דרמטית את התפיסה האנושית ועצם המחשבה ש"הרכב תמיד יכול לעצור בצד" והתחושה שאני שולט ברכב (כנראה בכל רכב יהיה מפסק "עצירה בצד הדרך") ולכן שולט במצב תמשיך להרגיע את הנוסעים שזה הכלי הבטוח יותר.
גם עצם זה שהנוסעים ברכב אוטונומי יראו אותו מתמרן ונמנע ממכשולים ורכבים אחרים יספק להם בטחון במערכת.
לכן לא צפוי כי כניסת רכבים אוטונומיים תשנה תפיסה זו. הנוסעים כנראה ימשיכו לנסוע ברכבים אוטונומיים כמו ברכבים מאוישים ללא מניעה פסיכולוגית משמעותית.
מטוס אוטונומי
כאמור, מחקרים רבים מראים שנוסעים במטוס מרגישים פחד וחוסר בטחון בכלי הטיס הרבה יותר מאשר ברכב. פסיכולוגים מסבירים זאת עקב תחושת חוסר השליטה במצב ובכלי וחוסר הכרות עם התווך האווירי.
כניסת מטוסים אוטונומיים רק צפויה להחריף את המצב. עצם הידיעה ש"אין שם אף אחד מקדימה", והשאלה מה יקרה אם תהיה תקלה במטוס עלולה, עבור חלק מהנוסעים, להיות צעד אחד רחוק מדי ולגרום להם לוותר על טיסה. העניין הזה כרגע נראה כבעיה משמעותית שתדרוש התייחסות ואסטרטגיית טיפול והתמודדות מיוחדים. עתיד התעופה תלוי בזה שהמון אנשים יטוסו והסוגייה הזו היא בפירוש פער בדרך למטוס אוטונומי.
*****
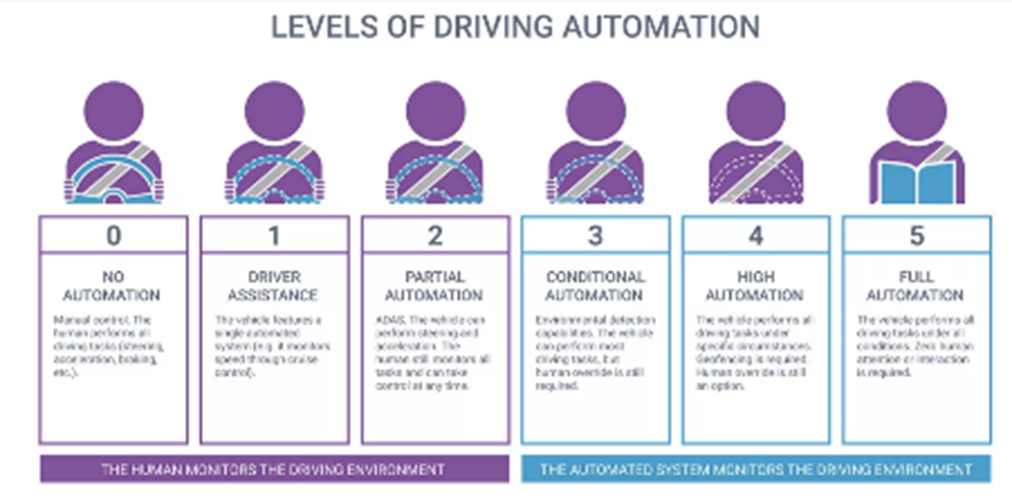
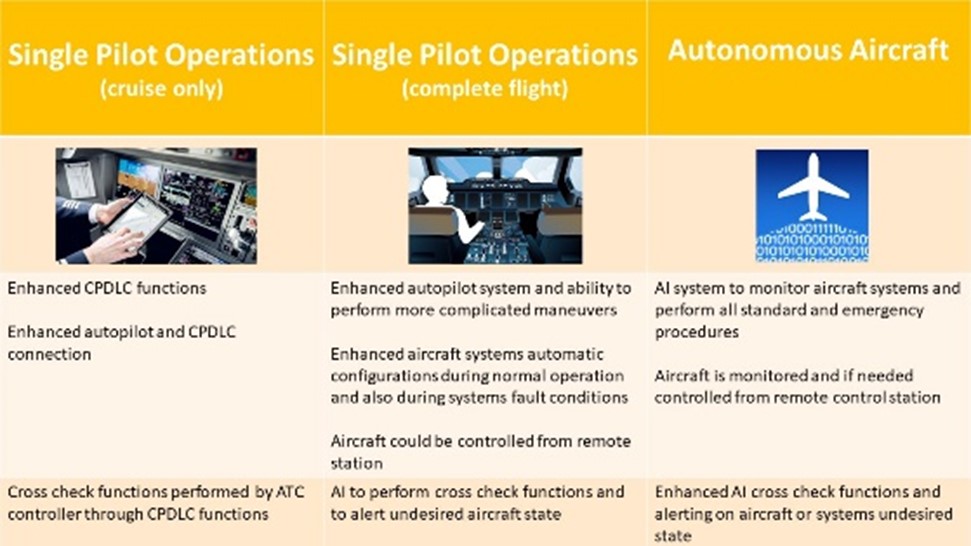
שלבי מימוש האוטומציה
אם תרצו, רמות האוטומציה של מערכת במעבר מתפעול אנושי לתפעול אוטונומי מלמדת משהו על הסיבוך של המערכת.
מכונית אוטונומית
מטוס אוטונומי
מהסקירה עולה, כי במישור הטכנולוגי המטוס האוטונומי הרבה יותר בשל ומוכן לכניסה לפעולה. במישור הרגולציה ובמישור הפסיכולוגי הרכב האוטונומי נמצא בנקודה הרבה יותר בשלה ומוכנה למבצעיות. מה יקדים את מה – ימים יגידו.