The Israeli Pilots Association magazine
הימים ימי שלהי מלחמת המפרץ השנייה. האמריקאים כבשו את בגדאד והיו עסוקים בטיהור קיני התנגדות עיראקית שנותרו במדינה העצומה ובמרדף אחרי סדאם. כמות הכוחות שהייתה בבגדאד חייבה אספקה שוטפת של לוגיסטיקה אשר בוצעה בעיקר על ידי מטוסים, כדי להימנע ממפגש עם קבוצות טרור עיראקיות, שעדיין ארבו לשיירות אספקה בדרכים. על רקע זה התארגן להמראה משדה התעופה הבינלאומי של בגדאד מטוס A300F של חברת European Air Transport בשירות חברת DHL. על המטוס פיקד קברניט בלגי בשם אריק גנו (Eric Gennotte), בן 38 עם 3300 שעות טיסה במטוסים גדולים חצי מהם על ה A300F. הק"ר סטיב מיכלסון, אף הוא בלגי, בן 29 שצבר 1275 שעות טיסה. יחד איתם היה גם מהנדס טיסה ותיק בשם מריו, בעל 13,400 שעות טיסה.
הטיסות אל ומהשדה בבגדאד היו אז חשופות לסיכון של טילי ק"א וכדי להקטין את הסכנה מטזק"א (טילים זעירי משקל קרקע אויר), בוצע בהמראות נוהל מיוחד: המטוס היה ממריא עם Slats בלבד (שקול להמראה Flap 1 במטוסי בואינג), קיפול Slats בגובה נמוך ואז טיפוס עם מטוס חלק במהירות מיטבית לזווית טיפוס מרבית (בערך 215 קשר) עד גובה יחסית גבוה. ההנחה הייתה, כי טיפוס תלול וצבירת גובה בסביבה הקרובה של השדה המאובטח אל מעל מעטפת הטזק"א היא הנתיב הבטוח ביותר.

המטוס המריא לקראת צהריי היום במשקל 100 טון (MTOW של 166 טון), קיפל את ה-Slats והמשיך בטיפוס בזווית גבוהה ומהירות נמוכה. סביב גובה 8,000 רגל חש הצוות בחבטה אדירה במטוס. מריו מהנדס הטיסה הכריז כמעט מיד כי אבדו שתי מערכות הידראוליות (מתוך השלוש שיש במטוס). אריק הקברניט, שהטיס את המטוס, ניסה לבחון את המצב ולהבין מה קורה. עברו 20 שניות מהחבטה ואריק הרגיש, כי ההגאים מתקשים ואינם מתפקדים, מיד שמע את מריו מכריז, שהם איבדו גם את מערכת הידראולית מספר 3.
בשלב הזה ההגאים (מאזנות, הגה גובה והגה כיוון) התיישרו עם זרימת האוויר כשהם חופשיים ברוח. בנוסף לא היה קיזוז מייצבי גובה, כיוון ומאזנות (גם הם מופעלים הידראולית). לא ניתן היה להוריד מדפים ו-Slats, גם ה-Spoilers חדלו מלתפקד. המטוס טס ללא שליטה. וכאילו זה אינו מספיק פרצה אש מאזור פגיעת הטילים (ליד מנוע שמאל לכיוון קצה הכנף). אחרי רגע או שניים מריו דיווח על נזילת דלק מכנף שמאל. חלק לא קטן מכנף שמאל נפגע מהפיצוץ ונותר גיבוב של פחים מעוכים ועקומים. אבל שני המנועים פעלו כרגיל.
הצוות היה מבועת, המטוס שהיה מקוזז בזמן אבדן ההידראוליקה שמר על טיפוס אך נכנס להטיה ופניה קלה עקב האסימטריה שנגרמה מפגיעת הטילים. ההגאים והמקזזים לא תפקדו והמטוס טס ללא שליטה. אחרי מספר שניות אריק התעשת וסגר מעט מנוע ופתאום שם לב, שהמטוס מוריד את האף ומתיישר ושומר פחות או יותר על טיסה אופקית.
עתה, בואו נדון קצת ביסודות האווירונאוטיקה ומכניקת הטייס, כדי להבין איך ניתן לשלוט במטוס רק בעזרת המנועים ונבין עד כמה מאתגרת הייתה המשימה מולה עמד צוות DHL.
המטוסים מתוכננים ונבנים באופן "איתן" (Robust) כך שכאשר מתרחשות תקלות, תאונות או אירועים, אפילו חריגים מאד, המטוסים יוכלו להמשיך לטוס ולהגיע לנחיתה בזכות תכונות של יציבות וניהוג המוטמעות במבנה. למשל, הדגמים השונים של מטוסי בואינג לאורך השנים די דומים האחד לשני, ובין הסיבות לדמיון זה מונח הצורך בפלטפורמה שתענה על דרישות האלה של יציבות וניהוג. Bare Airframe Flight Characteristics הוא מושג באווירונאוטיקה הבא לתאר את ההתנהגות הדינמית של מטוס שלם אבל ללא התוספת של בקרת טיסה והגאים פעילים.
סעיפי FAR רבים דורשים מה Bare Airframe להפגין סדרה ארוכה של תכונות טיסה ויציבות בסיסיות אשר תכליתם להבטיח כי תגובת המטוס הבסיסי גם ללא בקרת טיסה תהיה בטוחה ותאפשר שליטה במטוס ותתרום ליכולת החזרתו לנחיתה בטוחה. תכונות אלה של ה-Airframe נבדקות בניסויי טיסה באופן נרחב כאשר מטוס חדש מבצע רישוי TC לדגם.
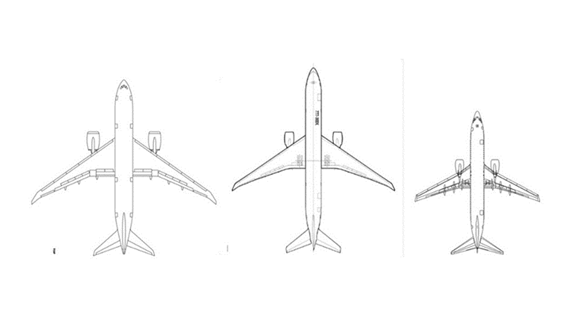
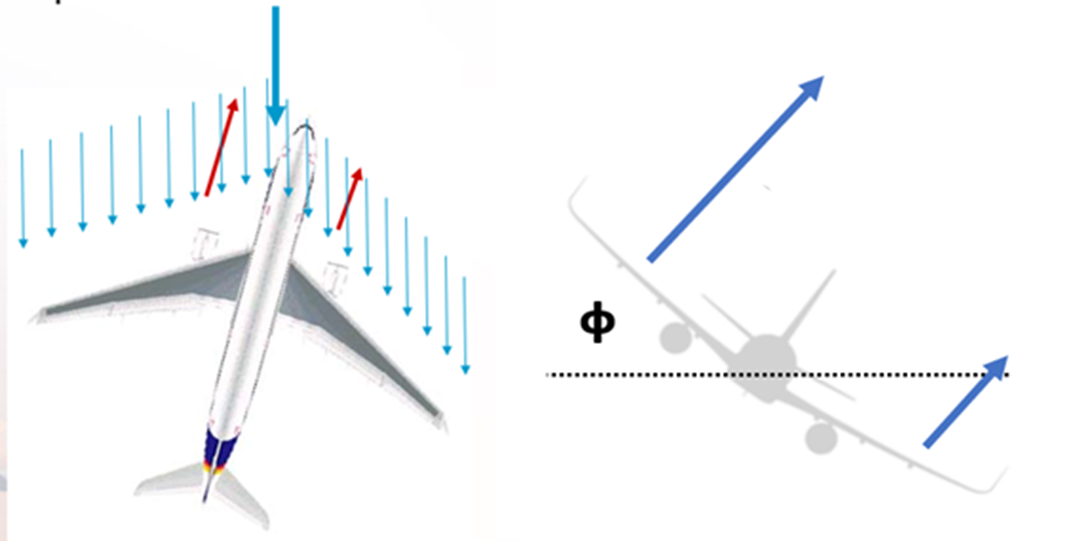
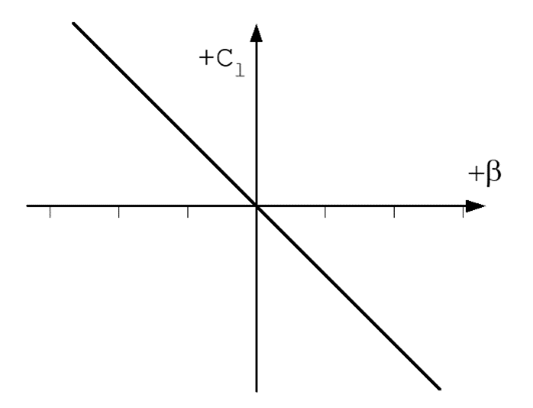
אחת התכונות הנדרשות מהפלטפורמה הבסיסית (Bare Airframe) במישור הרוחבי כיווני היא יכולת גלגול (הטיה) כפונקציה של זווית ההחלקה β. נדרש גם המצב ההופכי, הקטנת סיבסוב וזווית החלקה דרך הטית
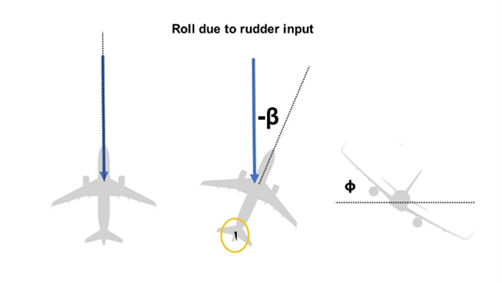
המטוס (גלגול). התכונה הזו נקראת אפקט הדיהדרל (Dihedral Effect). תכונה זו מושגת בעיקר עקב המשיכה החזקה יחסית של שפת ההתקפה של הכנפיים. שימוש בדוושות לסיבסוב המטוס יוצר זווית החלקה β אשר עקב אפקט הדיהדרל מביאה למומנט גלגול ומטה את המטוס.
באופן דומה שימוש בדחף אסימטרי יוצר גם הוא סיבסוב המביא לזווית החלקה הגורמת לגלגול המטוס לכיוון המנוע עם הדחף הנמוך.
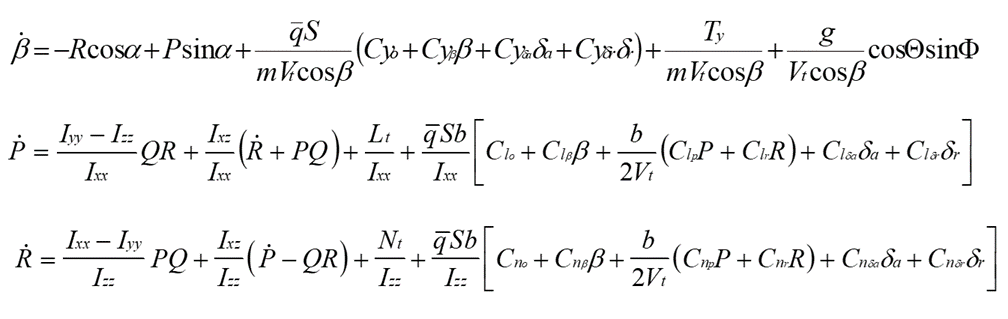
לאלו שרוצים לראות את התמונה באמצעות משוואות, אלו הן משוואות התנועה של צירי ה Lat-Dir (אחרי פישוט מסוים, השמטת רכיבים בעלי תרומה נמוכה ולינאריזציה):
כאשר המטוס במצב יציב ללא האצות כלומר אין שינוי בזווית β, אין שינוי בקצב הגלגול (·P) ואין שינוי בקצב הסיבסוב (·R), שזה פחות או יותר המצב בו מצא עצמו מטוס DHL אחרי אובדן ההידראוליקה והשוואה ל-0 (המטוס אינו מגלגל ואינו מסבסב) אפשר לפשט עוד את הנוסחאות ואחרי עוד מסג' לנתונים והנחה שהכנפיים מאוזנות מתקבלת הצורה הפשוטה הבאה:
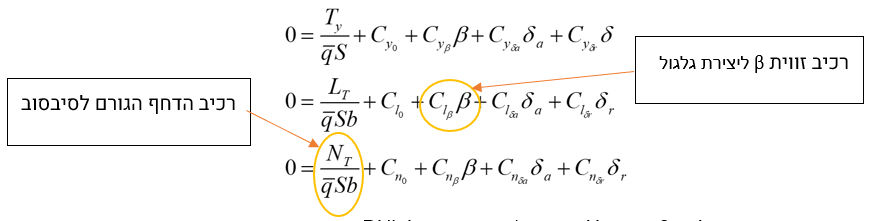
כאשר נוצרת זווית החלקה β אם בגלל סיבסוב (או במקרה של DHL כאשר הטייס בחר דחף אסימטרי כדי להיכנס לפניה) נוצר למטוס שעור גלגול בעיקר תודות לנגזרת C1β שהיא רבת עוצמה עקב אפקט הדיהדרל של המטוס (משיכת שפת ההתקפה של הכנפיים):
מומנט הגלגול נגרם כתוצאה מזווית ההחלקה (ולא מהסיבסוב) וכדי לעצור את הגלגול צריך להפסיק את ההחלקה. לכן טייסי DHL נדרשו לקבוע דחף אסימטרי במידה כזו, שיגלגל את המטוס בקצב לא גבוה מדי כך שבטיימינג הנכון יעצרו את הגלגול בהטיה הרצויה על ידי איזון הדחף ואיפוס זווית ההחלקה. זו משימה קשה מאד עקב זמן התגובה הארוך שבין שינוי הדחף ובין תגובת המטוס וגם בגלל שתגובת המטוס אינה לינארית.
המישור האורכי נשלט בפעולה רגילה על ידי הגאי הגובה (Elevators) ועל ידי משטחי ה-Stabilizers של המטוס. ה-Elevators נשלטים על ידי מוט ההיגוי ואילו ה Stabilizers על ידי המקזז. באירוע של DHL, עקב איבוד כל ההידראוליקה, אבדה השליטה על הגאי הגובה והם התיישרו בזרימה ואילו מייצבי הגובה

(Stabilizers) נתקעו במצב האחרון בו היו ולא ניתן היה להזיזם יותר. במצב זה בעצם ניתן היה לשלוט על מישור העלרוד אך ורק בעזרת שינוי דחף סימטרי של המנועים. שינוי דחף מנצל את מיקום המנועים מתחת ל CG של המטוס ולכן הוספת כוח גורמת למומנט הרמת אף וכניסת המטוס לטיפוס ואילו הפחתת כוח גורמת למומנט הורדת אף ובעקבותיו איבוד גובה והנמכה.
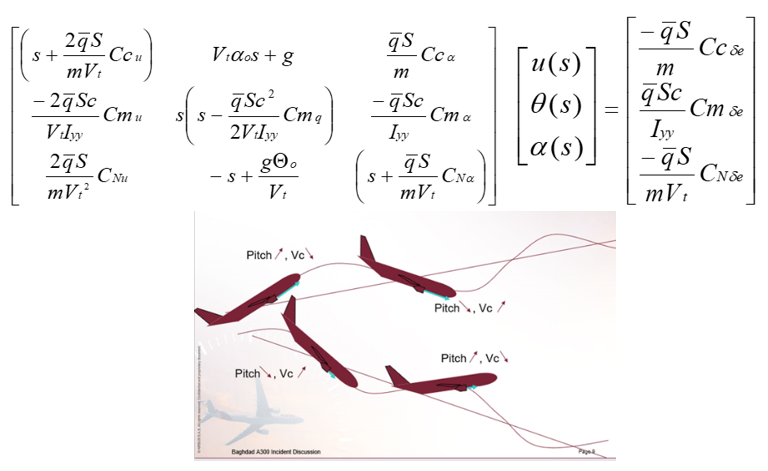
במשוואת התנועה של המישור האורכי זה נראה כך:
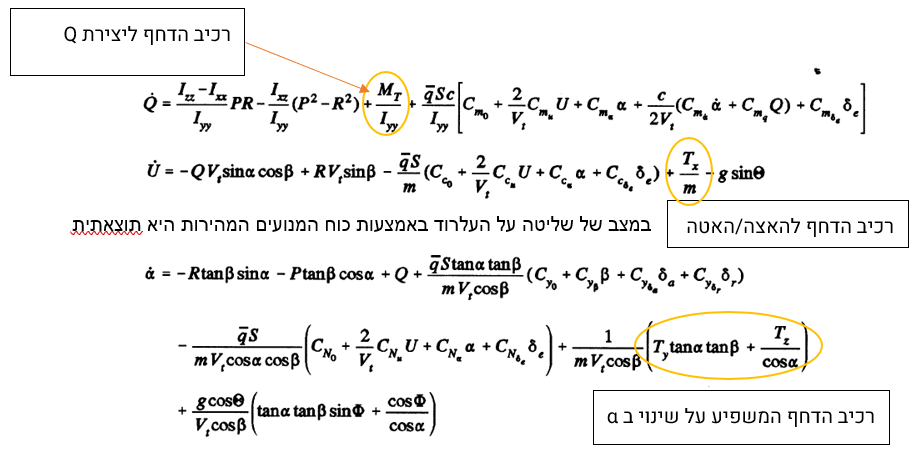
ותשאף לערך כלשהו התלוי במצב בו ה-Stabilizer והגה הגובה נמצאים, ובמצב אף הנשלט על ידי דחף המנועים (בטיסת DHL ה-Stabilizer נתקע על מצב מקוזז ל-215 קשר וההגה התיישר עם הזרימה). בשונה מהמצב הרגיל, פתיחת כוח תביא להרמת אף בקצב אשר ישתנה ויפחת ככל שהמהירות תרד מצב האף יעלה וזווית ההתקפה תגדל. הורדת כוח תביא להורדת אף ביחס למצב הקודם והגדלת מהירות. הטבלה הבאה מסכמת את המצב:
פעולה | מטוס שמיש | הגה גובה וקיזוז תקועים |
משיכת מוט ההיגוי / קיזוז ↑ | הרמת אף | אין תגובה |
דחיפת מוט ההיגוי / קיזוז ↓ | הורדת אף | אין תגובה |
פתיחת כוח | הגדלת מהירות | הרמת אף והקטנת מהירות |
הפחתת כוח | הקטנת מהירות | הורדת אף והגדלת מהירות |
וכאילו זה לא מספיק, מלבד השליטה הקשה במצב האף במישור העלרוד עקב אובדן ההידראוליקה ואי-תפקוד ההגאים, הופיעו לצוות DHL אוסילציות במישור העלרוד אשר לא היו מוכרות לטייסי DHL ואינן מוכרות לטייסים בכלל ולטייסי נתיבי אויר בפרט (לא מתאמנים על זה בסימולטור).
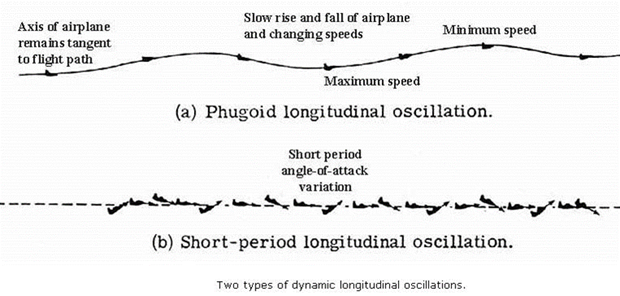
פתרון משוואות התנועה של מישור העלרוד מביא לשני מודי תנועה הבסיסים ביותר של המטוס: הראשון נקרא ה-SP-Short Period והוא מוד השליטה העיקרי במישור עלרוד המטוס. מוד זה יוצר תגובת מטוס מיידית ומשמעותית לפקודת ניהוג והוא גם "תגובתי" וגם מרוסן ברמה טובה אפילו כאשר בקרת הטיסה מנותקת (אבל ההגאים מתפקדים). כאשר אנו נותנים פקודת ניהוג תגובת המטוס המרכזית בעלרוד היא על ידי ה SP. מוד זה לא היה פעיל באירוע, כי ההגאים התיישרו עם הרוח עקב תקלת ההידראוליקה. לכן לא נדון בו. המוד השני הנקרא LP – Long Period או פוגואיד. הפוגואיד מאופיין בדרך כלל בריסון נמוך מאד או בהיותו בלתי מרוסן (במטוסי בואינג הוא תמיד מרוסן מעט), בזמן מחזור גבוה (שניות ארוכות) ובהשתנות של מהירות, מצב אף וגובה (בטיסה אופקית) סביב מצב נומינלי המתאים למיקום ה Stabilizers והגאי הגובה.
במשוואות תנועה (אחרי פישוט, מצב יציב, לינאריזציה ותנועות קטנות) אנחנו מקבלים את המשוואה הבאה:
אחרי הנחה כי זווית ההתקפה נשארת קבועה ונמוכה ואחרי מסג' ארוך בנתונים ופתרון המשוואה מתקבל הקירוב לתדר התנודה (שניות ארוכות):
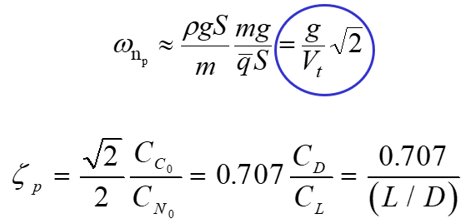
ולמקדם הריסון של התנודה (מעניין, הוא תלוי ב L/D של המטוס):
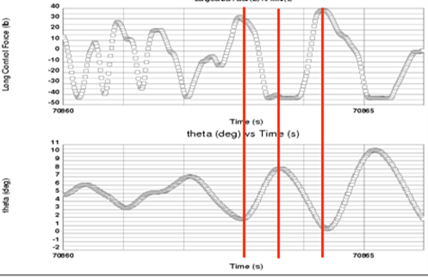
כאשר המטוס שמיש או בטיסה עם FD/Auto Pilot מערכת בקרת הטיסה מרסנת מוד זה ואנו איננו חשים בו כלל. אולם כאשר מערכת בק"ט מנוטרלת ומישור העלרוד נשלט על ידי דחף מנועים סימטרי אנו נבחין בתנודת מוד זה היטב (יראה לנו כאילו המטוס אינו מסוגל לשמור מצב אף ומהירות). למרות שהפוגואיד מרוסן ואמור לדעוך עם הזמן, הוא מאד רגיש לכל תנועה של הגה, קיזוז שינוי דחף מנוע או אויר לא יציב הגורמים לעירור של התנודה שוב ושוב. המהירות תעלה ותרד אפילו עד ±40 קשר, מצב אף עד ±10◦ (ובהתאם שיעור הטיפוס או ההנמכה). טייסי DHL נתקלו במוד זה לראשונה ונאלצו להתמודד עם הבעיות שיצר בשליטה במטוס כולל בקטע הקריטי של פיינל לנחיתה
PIO כשמו כן הוא: תנודה מחזורית היכולה להתבצע בכל מישור (עלרוד, רוחבי, כיווני) בנפרד או בכמה מישורים במשולב ויכולה גם להיות מתבדרת. אפשר להבין את הדינמיקה של התפתחות תנודה זו על ידי תיאור פיזיקלי (מתמטי) של הטייס כחלק אינטגרלי ממערכת הבקרה של המטוס Command Path and Feedback Control System.
כאשר הטייס נותן פקודת ניהוג במטוס שמיש, מערכת בקרת הטיסה מפעילה את משטחי ההיגוי והמטוס מגיב כמעט ללא Time Delay (מספרים אופייניים למטוס ללא Fly By Wire בערך 60ms ולמטוסי Fly By Wire סביב 100ms) וגם תגובת המטוס צפויה ומתאימה לגודל הזזת מוט ההגוי או הדוושות. זמן התגובה הקצר וגודלה של התגובה התואמת לציפיות הטייס נותנות לו שליטה מלאה וגם תחושה של שליטה מלאה במטוס.
כאשר נפגעות מערכות במטוס והוא מנוהג דרך שינוי דחף במנוע (סימטרי ואסימטרי) הזמן העובר בין הפקודה לתגובת המטוס עולה דרמטית (יכול להגיע לשניות ארוכות) וגודל תגובת המטוס שונה דרמטית מהציפייה של הטייס.
שני אלה גורמים לטייס להכניס Input ניהוג נוסף גדול יותר מהקודם עוד לפני שהתקבלה מלוא התנועה של המטוס ובכך לקבל בהמשך תגובה גדולה מדי ולא צפויה בעוצמתה, אז נוטה הטייס לתקן בחדות לכיוון השני תיקון גדול מדי והדבר גורם ל- Oscillations (היכולים להיות מתבדרים) העלולים לגרום לפגיעה משמעותית בשליטה בקו הטיסה הרצוי. PIO מפותח נראה בגרף הבא (הגרף העליון פקודות מוט ההיגוי, הגרף התחתון מצב אף), פקודות הטייס הם בפאזה של ◦180 לתגובת המטוס והתגובה מתבדרת. (הגרף המצורף אינו מאירוע
DHL אלא מטיסת ניסוי של מטוס אחר והוא כאן להמחשת ה-PIO).
השיטה לעצור PIO היא על ידי יציאת הטייס מלופ הניהוג, ונקראת FREEZE or RELEASE. יציאת הטייס
מהלופ (הפסקת פקודות ניהוג) כאשר מזהים Oscillations בתיקונים לקו הטיסה תפסיק את ה PIO באופן מידי. הטסה ב"הגבר" (Gain) נמוך כלומר פקודות ניהוג מדודות וקטנות יחד עם המתנה לתגובת המטוס לפני הכנסת פקודת ניהוג נוספת יקטינו את האפשרות להתפתחות Oscillations או PIO.
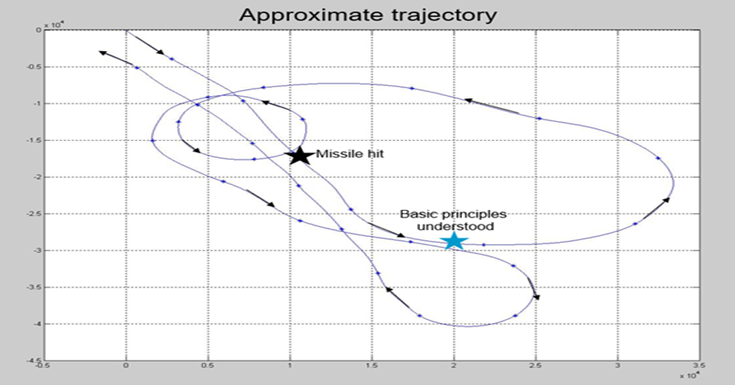
כאמור לעיל, אריק, קברניט מטוס DHL הפגוע, גילה שהוא יכול להחזיר שליטה מסוימת בציר העלרוד על ידי שינוי כוח סימטרי של המנועים. הצוות נזכר שבאימוני הסימולטור של אובדן מנוע המטוס מגלגל לכיוון המנוע שכשל והם הבינו שגם הם יכולים להשתמש, כפי שהסברנו, בדחף אסימטרי לטובת הטיית המטוס וניהוגו בציר האופקי. כאן עשה הצוות את אחד הדברים החשובים בטיסה: הם החלו להתאמן בהטסת המטוס ולמדו, כשהם עדיין בגובה, איך לשלוט במטוס ואיך להטיסו. הם נתקלו בכל התופעות שתיארנו קודם והבינו את משמעותן בגישה לנחיתה. הצוות החליט להוריד גלגלים (בחירום) בגובה וטסו עם גלגלים מטה. במהלך "לימוד" ההטסה הם הגיעו כמה פעמים להטיות של ◦30 ויותר וכמעט איבדו שליטה במטוס. אחרי שהרגישו מוכנים התארגן הצוות להנמכה איטית ופיינל ארוך. זה קירוב של הנתיב שביצעו.
בסופו של דבר, הם החליטו לנסות לנחות על מסלול 33R הארוך יותר. הרוח הייתה 290/20 טורבלנטית. מכיוון שהייתה להם נזילת דלק ובמטוס לא היה הרבה דלק כי תוכננה טיסה קצרה לבחריין, הם חששו שיגמר להם הדלק במיכל שמאל והמנוע יכבה (ואז תאבד יכולת ניהוג המטוס), מריו מונה לעקוב כל הזמן על הדלק ולהיות מוכן לפתוח את ה Cross feed ברגע שהכמות תרד יותר מדי.

בפיינל נאבקו הטייסים בפוגואיד, בניסיון לשמור ציר מסלול, וברוח החזקה. הם החליטו לעבור למסלול 33L. כ -25 דק' אחרי פגיעת הטיל הנחיתו הטייסים את המטוס על מסלול 33L בבגדד. הם הגיעו לתחילת מסלול בזווית של ◦8 לציר מסלול, מצב האף מעל האופק, ◦10 הטיה לימין ושעור הנמכה של מתחת 10 רגל/שניה. סגירת המנוע בוצעה רק לאחר הנגיעה בקרקע. כדי לשכך את הנגיעה, המטוס ירד מציר מסלול כמעט מיד, הצוות בחר רברס מלא במנועים והם נתנו את שלהם. המטוס נעצר אחרי 1000 מטר, עומד על גלגליו. אף אחד לא נפגע לא מצוות המטוס ולא על הקרקע.



זה סיפורה המופלא של טיסת DHL מבגדאד לבחריין לפני כמעט 20 שנה. צוות הטיסה עשה את הלא יאומן בקור רוח תוך הפגנת יכולת ברמה הגבוהה ביותר האפשרית. הצוות ניהל את המצב נכון, עבד כצוות מלוכד,
חילק עבודה ואחריות לאורך כל האירוע. הם לא שכחו לרגע את העקרונות הבסיסים:
Aviate
Navigate
Communicate
Monitor/Cross Ch

הצוות קיבל את פרס FSF לביצוע יוצא מהכלל של טיסה בתנאים קשים ביותר ועוד מספר פרסים נוספים.
3 Responses
היי אהרון
מי כתב את המאמר הנהדר הזה?
בדיקת המשובים.
כתבה מעניינת מאד
אם אתה כותב הסבר עם משוואות תנועה, היה נחמד אם היית כותב בצד הסבר על כל משתנה , ככה אנשים שלא למדו בקרה אוטומטית של כלי טיס, יוכלו להבין במה מדובר.